环境
- windows 10 64bit
- python 3.8
- pytorch1.7.1 + cu101
视频看这里
Youtube
Bilibili
简介
前面,我们介绍过 基于YOLOv5和DeepSort的目标跟踪,最近大神又在刚出的 YOLOv7 的基础上加上了目标跟踪,跟踪部分使用的是基于 OSNet 的 StrongSORT,项目地址: https://github.com/mikel-brostrom/Yolov7_StrongSORT_OSNet。
源码下载
首先去下载源码,目前作者已经发布了 v1.0 正式版,我们就用它
# 使用参数-b下载特定tag的源码,--recurse-submodules参数是为了递归下载根目录下的子项目,这里有yolov7,它是从官方的仓库fork而来,还有deep-person-reid,这种方式也是开源项目中非常常见的依赖管理模式
git clone --recurse-submodules https://github.com/mikel-brostrom/Yolov7_StrongSORT_OSNet.git -b v1.0这里不建议直接去下载 zip 包,很多新手会碰到这个问题,然后就跑来问,运行程序的时候,为什么缺模块?这是因为,项目中包含了子项目,而子项目往往是一个链接,它并没有直接放到本项目中去管理维护,所以,下载的 zip 中并不包含子项目的源码。
如果因为网络原因,实在是 clone 不下来,可以参考下面的操作
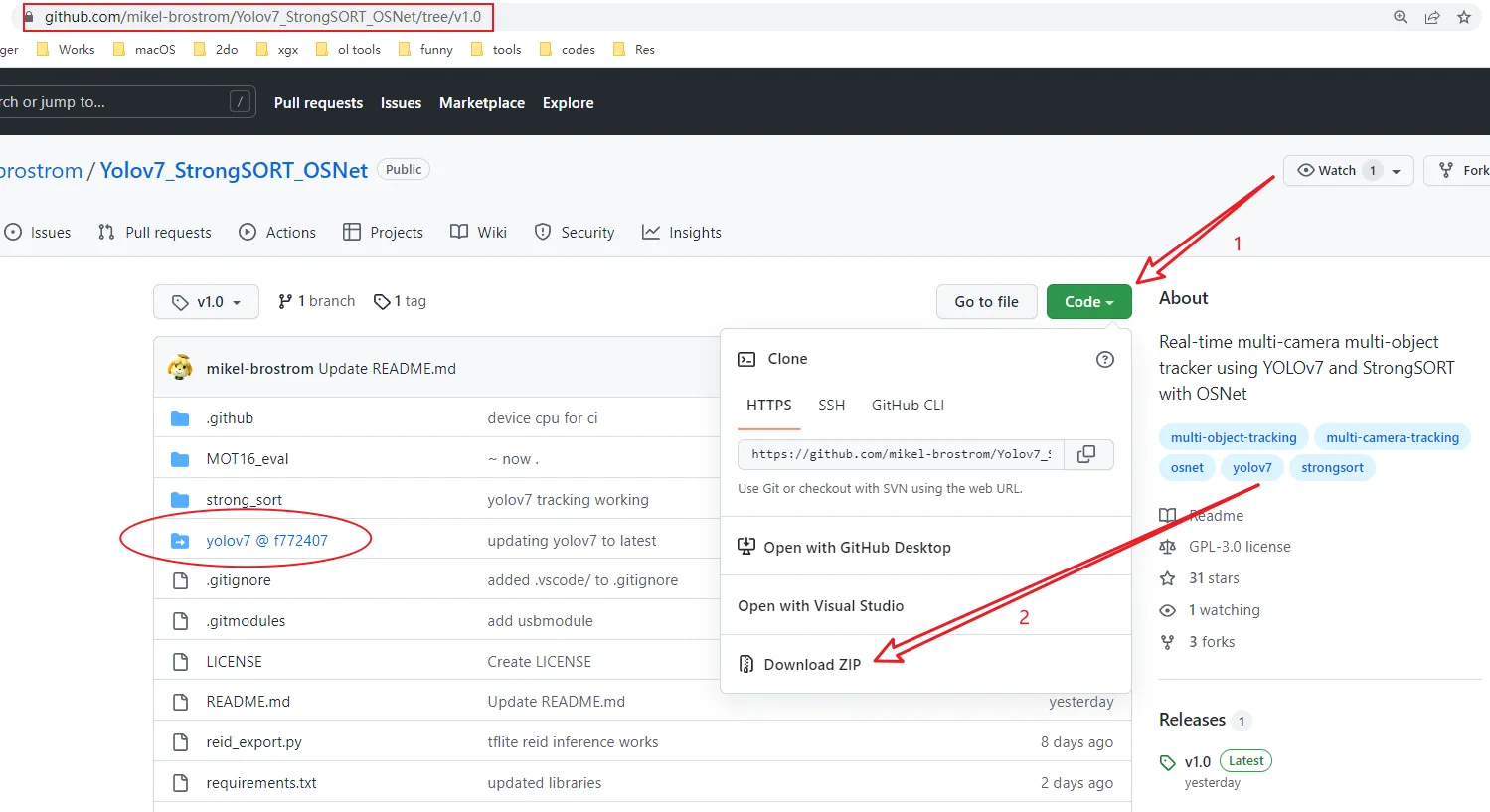
找到对应的 tag 标签,比如现在的 v1.0 版本,然后点击进入对应版本的源码

然后下载 zip 压缩包
至于源码中的子项目,注意到,它的项目名后面带了一个 commit id,我们可以直接点击进去,下载 zip 压缩包进行解压。如果有多个子项目,就依次操作多次
安装项目依赖
下面来安装依赖
# 安装gpu版本的pytorch1.7.1,cuda10.1
pip install torch==1.7.1+cu101 torchvision==0.8.2+cu101 torchaudio==0.7.2 -f https://download.pytorch.org/whl/torch_stable.html除此之外,将 requirements.txt 文件中的 torch 和 torchvision 注释掉,然后执行安装其它依赖
pip install -r requirements.txt实践
环境准备好了,那就找个视频来跑跑看效果,执行
python track.py --source test.mp4 --strong-sort-weights osnet_x0_25_market1501.pt这里是 source 可以是视频文件、摄像头 ID 或者网络视频(rtsp、http、https 都支持),参数 --strong-sort-weights 是指使用的 reid 重识别模型,模型可以到 https://kaiyangzhou.github.io/deep-person-reid/MODEL_ZOO 下载,这里的模型后缀是 pth,可以直接重命名为 pt
程序执行过程中,会去自动下载2个模型文件,一个是 yolov7的,另一个是你指定的 reid 模型,一个是存放的 github 上,下载后放在源码目录下的 weights 文件夹内;另一个是存放的 google 网盘里,下载后放在源码根目录下。

完整的 track.py 参数列表如下,除了 --strong-sort-weights 和 --config-strongsort,其余都是 yolov7 支持的命令行参数
(pytorch1.7) PS D:\Github\Yolov7_StrongSORT_OSNet> python .\track.py -h
strong_sort/deep/reid\torchreid\metrics\rank.py:11: UserWarning: Cython evaluation (very fast so highly recommended) is unavailable, now use python evaluation.
warnings.warn(
usage: track.py [-h] [--yolo-weights YOLO_WEIGHTS [YOLO_WEIGHTS ...]] [--strong-sort-weights STRONG_SORT_WEIGHTS] [--config-strongsort CONFIG_STRONGSORT] [--source SOURCE] [--imgsz IMGSZ [IMGSZ ...]]
[--conf-thres CONF_THRES] [--iou-thres IOU_THRES] [--max-det MAX_DET] [--device DEVICE] [--show-vid] [--save-txt] [--save-conf] [--save-crop] [--save-vid] [--nosave]
[--classes CLASSES [CLASSES ...]] [--agnostic-nms] [--augment] [--visualize] [--update] [--project PROJECT] [--name NAME] [--exist-ok] [--line-thickness LINE_THICKNESS] [--hide-labels]
[--hide-conf] [--hide-class] [--half] [--dnn]
optional arguments:
-h, --help show this help message and exit
--yolo-weights YOLO_WEIGHTS [YOLO_WEIGHTS ...]
model.pt path(s)
--strong-sort-weights STRONG_SORT_WEIGHTS
--config-strongsort CONFIG_STRONGSORT
--source SOURCE file/dir/URL/glob, 0 for webcam
--imgsz IMGSZ [IMGSZ ...], --img IMGSZ [IMGSZ ...], --img-size IMGSZ [IMGSZ ...]
inference size h,w
--conf-thres CONF_THRES
--classes CLASSES [CLASSES ...]
filter by class: --classes 0, or --classes 0 2 3
--agnostic-nms class-agnostic NMS
--augment augmented inference
--visualize visualize features
--update update all models
--project PROJECT save results to project/name
--name NAME save results to project/name
--exist-ok existing project/name ok, do not increment
--line-thickness LINE_THICKNESS
bounding box thickness (pixels)
--hide-labels hide labels
--hide-conf hide confidences
--hide-class hide IDs
--half use FP16 half-precision inference
--dnn use OpenCV DNN for ONNX inference
这里提几个比较常用的参数,检测时显示结果跟参数 --show-vid;保存结果跟参数 --save-vid;如果模型中包含多个目标,但实际只想检测某一个目标时,跟参数 --classes,它的值是目标的 id
Q & A
下面是常见的一些错误及解决方法
AttributeError: partially initialized module 'cv2' has no attribute 'gapi_wip_gst_GStreamerPipeline' (most likely due to a circular import)升级 opencv-python,执行 pip install -U opencv-python
(pytorch1.7) PS D:\Github\Yolov7_StrongSORT_OSNet> python track.py --source test.mp4 --strong-sort-weights osnet_x0_25_market1501.pt
strong_sort/deep/reid\torchreid\metrics\rank.py:11: UserWarning: Cython evaluation (very fast so highly recommended) is unavailable, now use python evaluation.
warnings.warn(
Fusing layers...
RepConv.fuse_repvgg_block
RepConv.fuse_repvgg_block
RepConv.fuse_repvgg_block
Model: osnet_x0_25
** The following layers are discarded due to unmatched keys or layer size: ['classifier.weight', 'classifier.bias']
(1, 256, 128, 3)
video 1/1 (1/7501) D:\Github\Yolov7_StrongSORT_OSNet\test.mp4: Traceback (most recent call last):
File "track.py", line 332, in <module>
main(opt)
File "track.py", line 327, in main
run(**vars(opt))
File "D:\Tools\anaconda3\envs\pytorch1.7\lib\site-packages\torch\autograd\grad_mode.py", line 26, in decorate_context
return func(*args, **kwargs)
File "track.py", line 149, in run
for frame_idx, (path, im, im0s, vid_cap) in enumerate(dataset):
File "D:\Github\Yolov7_StrongSORT_OSNet\yolov7\utils\datasets.py", line 191, in __next__
img = letterbox(img0, self.img_size, stride=self.stride)[0]
File "D:\Github\Yolov7_StrongSORT_OSNet\yolov7\utils\datasets.py", line 1000, in letterbox
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
File "D:\Tools\anaconda3\envs\pytorch1.7\lib\site-packages\torch\tensor.py", line 630, in __array__
return self.numpy()
TypeError: can't convert cuda:0 device type tensor to numpy. Use Tensor.cpu() to copy the tensor to host memory first.修改 track.py 中的 loadImages 部分,将原来的
dataset = LoadImages(source, img_size=imgsz, stride=stride)改为
dataset = LoadImages(source, img_size=imgsz, stride=stride.cpu().numpy())可以参考官方 issue
下载
本文中使用的 v1.0 版本的完整工程,放在网盘里,方便大伙下载
链接:https://pan.baidu.com/s/1di_ju3JeoZDpnX3IuSBLlw
提取码:y3ib


