环境
- ubuntu 18.04 64bit
- python 3.8
- pytorch1.8.2 + cu111
视频看这里
Youtube
Bilibili
简介
前文 YOLOv7 提到了除目标检测外,未来 YOLOv7 还会在人体姿态估计和实例分割领域得到应用,不过那会作者只开放了姿态估计的模型。好消息是,最近,YOLOv7 作者就放出了实例分割的模型。本文我们就来看看 YOLOv7 在实例分割方面的表现。
实践
实例分割的代码存放在分支 mask 里,目前还是在不断完善中,我们直接下载分支上最新的代码
git clone https://github.com/WongKinYiu/yolov7.git -b mask yolov7-mask
cd yolov7-mask分割的部分依赖于 facebook 的 detectron2,而 detectron2 要求 torch 版本大于 1.8,由于之前我一直用的都是 1.7.1,因此这里需要创建一个新的环境
# 创建新的虚拟环境
conda create -n pytorch1.8 python=3.8
conda activate pytorch1.8
# 安装 torch 1.8.2
pip install torch==1.8.2 torchvision==0.9.2 torchaudio===0.8.2 --extra-index-url https://download.pytorch.org/whl/lts/1.8/cu111
# 修改requirements.txt,将其中的torch和torchvision注释掉
pip install -r requirements.txt
# 安装detectron2
git clone https://github.com/facebookresearch/detectron2
cd detectron2
python setup.py install
cd ..然后去下载实例分割的模型 https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-mask.pt,将模型放入源码目录中
分割的示例代码在 tools/instance.ipynb,可以在 jupyter notebook 中直接运行
如果需要将 ipynb 文件转成 python 文件,就执行
jupyter nbconvert --to python tools/instance.ipynb
将生成的 tools/instance.py 拷贝到源码根目录下,然后修改文件的最后显示部分为保存结果图片
import matplotlib.pyplot as plt
import torch
import cv2
import yaml
from torchvision import transforms
import numpy as np
from utils.datasets import letterbox
from utils.general import non_max_suppression_mask_conf
from detectron2.modeling.poolers import ROIPooler
from detectron2.structures import Boxes
from detectron2.utils.memory import retry_if_cuda_oom
from detectron2.layers import paste_masks_in_image
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
with open('data/hyp.scratch.mask.yaml') as f:
hyp = yaml.load(f, Loader=yaml.FullLoader)
weigths = torch.load('yolov7-mask.pt')
model = weigths['model']
model = model.half().to(device)
_ = model.eval()
image = cv2.imread('inference/images/horses.jpg') # 504x378 image
image = letterbox(image, 640, stride=64, auto=True)[0]
image_ = image.copy()
image = transforms.ToTensor()(image)
image = torch.tensor(np.array([image.numpy()]))
image = image.to(device)
image = image.half()
output = model(image)
inf_out, train_out, attn, mask_iou, bases, sem_output = output['test'], output['bbox_and_cls'], output['attn'], output['mask_iou'], output['bases'], output['sem']
bases = torch.cat([bases, sem_output], dim=1)
nb, _, height, width = image.shape
names = model.names
pooler_scale = model.pooler_scale
pooler = ROIPooler(output_size=hyp['mask_resolution'], scales=(pooler_scale,), sampling_ratio=1, pooler_type='ROIAlignV2', canonical_level=2)
output, output_mask, output_mask_score, output_ac, output_ab = non_max_suppression_mask_conf(inf_out, attn, bases, pooler, hyp, conf_thres=0.25, iou_thres=0.65, merge=False, mask_iou=None)
pred, pred_masks = output[0], output_mask[0]
base = bases[0]
bboxes = Boxes(pred[:, :4])
original_pred_masks = pred_masks.view(-1, hyp['mask_resolution'], hyp['mask_resolution'])
pred_masks = retry_if_cuda_oom(paste_masks_in_image)( original_pred_masks, bboxes, (height, width), threshold=0.5)
pred_masks_np = pred_masks.detach().cpu().numpy()
pred_cls = pred[:, 5].detach().cpu().numpy()
pred_conf = pred[:, 4].detach().cpu().numpy()
nimg = image[0].permute(1, 2, 0) * 255
nimg = nimg.cpu().numpy().astype(np.uint8)
nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR)
nbboxes = bboxes.tensor.detach().cpu().numpy().astype(np.int)
pnimg = nimg.copy()
for one_mask, bbox, cls, conf in zip(pred_masks_np, nbboxes, pred_cls, pred_conf):
if conf < 0.25:
continue
color = [np.random.randint(255), np.random.randint(255), np.random.randint(255)]
pnimg[one_mask] = pnimg[one_mask] * 0.5 + np.array(color, dtype=np.uint8) * 0.5
pnimg = cv2.rectangle(pnimg, (bbox[0], bbox[1]), (bbox[2], bbox[3]), color, 2)
#label = '%s %.3f' % (names[int(cls)], conf)
#t_size = cv2.getTextSize(label, 0, fontScale=0.5, thickness=1)[0]
#c2 = bbox[0] + t_size[0], bbox[1] - t_size[1] - 3
#pnimg = cv2.rectangle(pnimg, (bbox[0], bbox[1]), c2, color, -1, cv2.LINE_AA) # filled
#pnimg = cv2.putText(pnimg, label, (bbox[0], bbox[1] - 2), 0, 0.5, [255, 255, 255], thickness=1, lineType=cv2.LINE_AA)
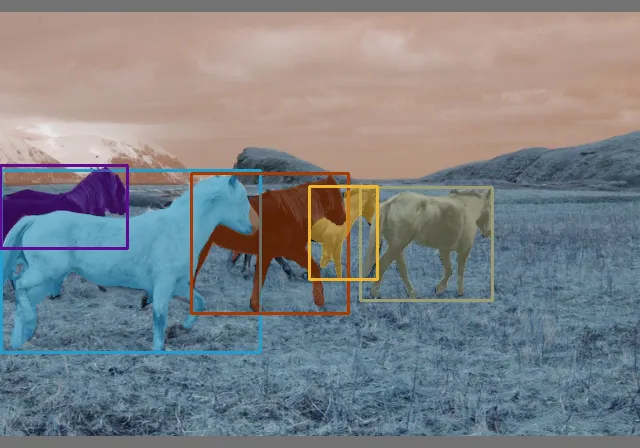
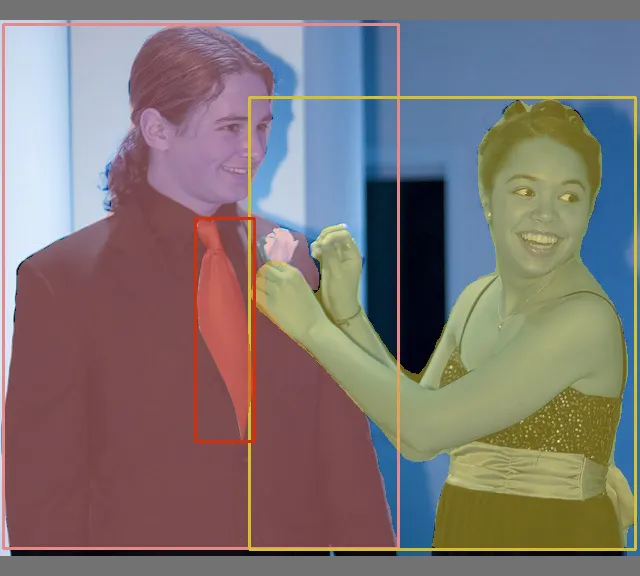
cv2.imwrite("instance_result.jpg", pnimg)找了2张测试图片,看看效果
同样的,这里也提供一份视频文件或摄像头检测的代码
import torch
import cv2
import yaml
from torchvision import transforms
import numpy as np
from utils.datasets import letterbox
from utils.general import non_max_suppression_mask_conf
from detectron2.modeling.poolers import ROIPooler
from detectron2.structures import Boxes
from detectron2.utils.memory import retry_if_cuda_oom
from detectron2.layers import paste_masks_in_image
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
with open('data/hyp.scratch.mask.yaml') as f:
hyp = yaml.load(f, Loader=yaml.FullLoader)
weigths = torch.load('yolov7-mask.pt')
model = weigths['model']
model = model.half().to(device)
_ = model.eval()
cap = cv2.VideoCapture('vehicle_test.mp4')
if (cap.isOpened() == False):
print('open failed.')
exit(-1)
# 分辨率
frame_width = int(cap.get(3))
frame_height = int(cap.get(4))
# 图片缩放
vid_write_image = letterbox(cap.read()[1], (frame_width), stride=64, auto=True)[0]
resize_height, resize_width = vid_write_image.shape[:2]
# 保存结果视频
out = cv2.VideoWriter("result_instance.mp4",
cv2.VideoWriter_fourcc(*'mp4v'), 30,
(resize_width, resize_height))
while(cap.isOpened):
flag, image = cap.read()
if flag:
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image = letterbox(image, frame_width, stride=64, auto=True)[0]
image_ = image.copy()
image = transforms.ToTensor()(image)
image = torch.tensor(np.array([image.numpy()]))
image = image.to(device)
image = image.half()
with torch.no_grad():
output = model(image)
inf_out, train_out, attn, mask_iou, bases, sem_output = output['test'], output['bbox_and_cls'], output['attn'], output['mask_iou'], output['bases'], output['sem']
bases = torch.cat([bases, sem_output], dim=1)
nb, _, height, width = image.shape
names = model.names
pooler_scale = model.pooler_scale
pooler = ROIPooler(output_size=hyp['mask_resolution'], scales=(pooler_scale,), sampling_ratio=1, pooler_type='ROIAlignV2', canonical_level=2)
output, output_mask, output_mask_score, output_ac, output_ab = non_max_suppression_mask_conf(inf_out, attn, bases, pooler, hyp, conf_thres=0.25, iou_thres=0.65, merge=False, mask_iou=None)
pred, pred_masks = output[0], output_mask[0]
base = bases[0]
bboxes = Boxes(pred[:, :4])
original_pred_masks = pred_masks.view(-1, hyp['mask_resolution'], hyp['mask_resolution'])
pred_masks = retry_if_cuda_oom(paste_masks_in_image)( original_pred_masks, bboxes, (height, width), threshold=0.5)
pred_masks_np = pred_masks.detach().cpu().numpy()
pred_cls = pred[:, 5].detach().cpu().numpy()
pred_conf = pred[:, 4].detach().cpu().numpy()
nimg = image[0].permute(1, 2, 0) * 255
nimg = nimg.cpu().numpy().astype(np.uint8)
nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR)
nbboxes = bboxes.tensor.detach().cpu().numpy().astype(np.int)
pnimg = nimg.copy()
for one_mask, bbox, cls, conf in zip(pred_masks_np, nbboxes, pred_cls, pred_conf):
if conf < 0.25:
continue
color = [np.random.randint(255), np.random.randint(255), np.random.randint(255)]
pnimg[one_mask] = pnimg[one_mask] * 0.5 + np.array(color, dtype=np.uint8) * 0.5
pnimg = cv2.rectangle(pnimg, (bbox[0], bbox[1]), (bbox[2], bbox[3]), color, 2)
cv2.imshow('YOLOv7 mask', pnimg)
out.write(pnimg)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
break
cap.release()
cv2.destroyAllWindows()
