环境
- windows 10 64bit
- openpose 1.7.0
- python 3.8
前言
在前文 windows编译openpose及在python中调用 的基础上,本篇在 openpose 输出的骨骼关节点信息基础上,计算出相关部位的角度。
基本原理与实例代码
openpose 输出的关键点信息如下图,总共有25个关节点
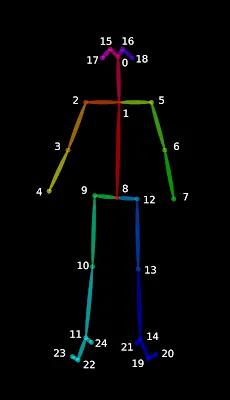
序列对应的关节名称如下
{0, "Nose"},
{1, "Neck"},
{2, "RShoulder"},
{3, "RElbow"},
{4, "RWrist"},
{5, "LShoulder"},
{6, "LElbow"},
{7, "LWrist"},
{8, "MidHip"},
{9, "RHip"},
{10, "RKnee"},
{11, "RAnkle"},
{12, "LHip"},
{13, "LKnee"},
{14, "LAnkle"},
{15, "REye"},
{16, "LEye"},
{17, "REar"},
{18, "LEar"},
{19, "LBigToe"},
{20, "LSmallToe"},
{21, "LHeel"},
{22, "RBigToe"},
{23, "RSmallToe"},
{24, "RHeel"},
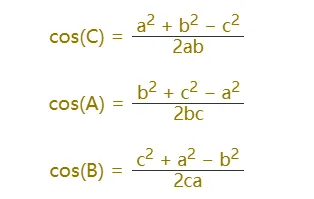
{25, "Background"}要计算这个角度,使用的是余弦定理。先来回顾一下,看下面这张图
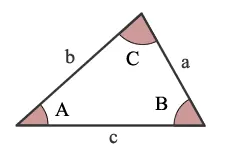
夹角用大写 A、B、C 表示,边长用小写 a、b、c 来表示,余弦定理的数学公式如下
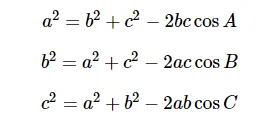
因此,可得出,各角度的计算公式
最后,来看看 python 代码实例
# keypoints_from_images.py
import sys
import cv2
import os
from sys import platform
import argparse
import time
import math
def angle_between_points( p0, p1, p2 ):
# 计算角度
a = (p1[0]-p0[0])**2 + (p1[1]-p0[1])**2
b = (p1[0]-p2[0])**2 + (p1[1]-p2[1])**2
c = (p2[0]-p0[0])**2 + (p2[1]-p0[1])**2
if a * b == 0:
return -1.0
return math.acos( (a+b-c) / math.sqrt(4*a*b) ) * 180 /math.pi
def get_angle_point(human, pos):
# 返回各个部位的关键点
pnts = []
if pos == 'left_elbow':
pos_list = (5,6,7)
elif pos == 'left_hand':
pos_list = (1,5,7)
elif pos == 'left_knee':
pos_list = (12,13,14)
elif pos == 'left_ankle':
pos_list = (5,12,14)
elif pos == 'right_elbow':
pos_list = (2,3,4)
elif pos == 'right_hand':
pos_list = (1,2,4)
elif pos == 'right_knee':
pos_list = (9,10,11)
elif pos == 'right_ankle':
pos_list = (2,9,11)
else:
print('Unknown [%s]', pos)
return pnts
for i in range(3):
if human[pos_list[i]][2] <= 0.1:
print('component [%d] incomplete'%(pos_list[i]))
return pnts
pnts.append((int( human[pos_list[i]][0]), int( human[pos_list[i]][1])))
return pnts
def angle_left_hand(human):
pnts = get_angle_point(human, 'left_hand')
if len(pnts) != 3:
print('component incomplete')
return -1
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('left hand angle:%f'%(angle))
return angle
def angle_left_elbow(human):
pnts = get_angle_point(human, 'left_elbow')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('left elbow angle:%f'%(angle))
return angle
def angle_left_knee(human):
pnts = get_angle_point(human, 'left_knee')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('left knee angle:%f'%(angle))
return angle
def angle_left_ankle(human):
pnts = get_angle_point(human, 'left_ankle')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('left ankle angle:%f'%(angle))
return angle
def angle_right_hand(human):
pnts = get_angle_point(human, 'right_hand')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('right hand angle:%f'%(angle))
return angle
def angle_right_elbow(human):
pnts = get_angle_point(human, 'right_elbow')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('right elbow angle:%f'%(angle))
return angle
def angle_right_knee(human):
pnts = get_angle_point(human, 'right_knee')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('right knee angle:%f'%(angle))
return angle
def angle_right_ankle(human):
pnts = get_angle_point(human, 'right_ankle')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('right ankle angle:%f'%(angle))
return angle
try:
# Import Openpose (Windows/Ubuntu/OSX)
dir_path = os.path.dirname(os.path.realpath(__file__))
try:
# Windows Import
if platform == "win32":
# Change these variables to point to the correct folder (Release/x64 etc.)
sys.path.append(dir_path + '/../../build/python/openpose/Debug');
# sys.path.append(dir_path + '/../../build/python/openpose/Debug')
# os.environ['PATH'] = os.environ['PATH'] + ';' + dir_path + '/../../build/x64/Debug;' + dir_path + '/../../bin;'
os.environ['PATH'] = os.environ['PATH'] + ';' + dir_path + '/../../build/x64/Debug;' + dir_path + '/../../build/bin;'
import pyopenpose as op
else:
# Change these variables to point to the correct folder (Release/x64 etc.)
sys.path.append('../../python')
# If you run `make install` (default path is `/usr/local/python` for Ubuntu), you can also access the OpenPose/python module from there. This will install OpenPose and the python library at your desired installation path. Ensure that this is in your python path in order to use it.
# sys.path.append('/usr/local/python')
from openpose import pyopenpose as op
except ImportError as e:
print('Error: OpenPose library could not be found. Did you enable `BUILD_PYTHON` in CMake and have this Python script in the right folder?')
raise e
# Flags
parser = argparse.ArgumentParser()
parser.add_argument("--image_dir", default="images", help="Process a directory of images. Read all standard formats (jpg, png, bmp, etc.).")
parser.add_argument("--no_display", default=False, help="Enable to disable the visual display.")
args = parser.parse_known_args()
# Custom Params (refer to include/openpose/flags.hpp for more parameters)
params = dict()
params["model_folder"] = "../../models/"
# Add others in path?
for i in range(0, len(args[1])):
curr_item = args[1][i]
if i != len(args[1])-1: next_item = args[1][i+1]
else: next_item = "1"
if "--" in curr_item and "--" in next_item:
key = curr_item.replace('-','')
if key not in params: params[key] = "1"
elif "--" in curr_item and "--" not in next_item:
key = curr_item.replace('-','')
if key not in params: params[key] = next_item
# Starting OpenPose
opWrapper = op.WrapperPython()
opWrapper.configure(params)
opWrapper.start()
# Read frames on directory
imagePaths = op.get_images_on_directory(args[0].image_dir);
# Process and display images
for imagePath in imagePaths:
datum = op.Datum()
imageToProcess = cv2.imread(imagePath)
datum.cvInputData = imageToProcess
opWrapper.emplaceAndPop(op.VectorDatum([datum]))
# print("Body keypoints: \n" + str(datum.poseKeypoints))
human_count = len(datum.poseKeypoints)
# for i in range(human_count):
# for j in range(25):
# print(datum.poseKeypoints[i][j][0])
for i in range(human_count):
angle_left_hand(datum.poseKeypoints[i] )
angle_left_elbow(datum.poseKeypoints[i] )
angle_left_knee(datum.poseKeypoints[i] )
angle_left_ankle(datum.poseKeypoints[i] )
angle_right_hand(datum.poseKeypoints[i] )
angle_right_elbow(datum.poseKeypoints[i] )
angle_right_knee(datum.poseKeypoints[i] )
angle_right_ankle(datum.poseKeypoints[i] )
if not args[0].no_display:
cv2.imshow("OpenPose 1.7.0 - Tutorial Python API", datum.cvOutputData)
cv2.imwrite("{}.jpg".format(time.time()), datum.cvOutputData)
key = cv2.waitKey(15)
if key == 27: break
except Exception as e:
print(e)
sys.exit(-1)最后准备张测试图片,执行代码
python keypoints_from_images.py --image_dir ..\media可以得到
Starting OpenPose Python Wrapper...
Auto-detecting all available GPUs... Detected 1 GPU(s), using 1 of them starting at GPU 0.
left hand angle:72.597296
left elbow angle:105.013366
left knee angle:150.508638
left ankle angle:157.977345
right hand angle:91.741660
right elbow angle:111.680674
right knee angle:154.645155
right ankle angle:174.466738
component [7] incomplete
component incomplete
component [6] incomplete
component incomplete
left knee angle:99.754916
left ankle angle:149.442500
right hand angle:135.324925
right elbow angle:169.808498
component [10] incomplete
component incomplete
component [11] incomplete
component incomplete这里解释一下,以左手为例,它对应的三个关键点是(1, 2, 4),也就是下图中的三根黑线的交点,计算出来的角度如图所示,为72.597296度